




Bike Power Supply
der Nabendynamo als Stromquelle für Navi oder Smartphone
Vorwort
Warnung: Diese Seite richtet sich an Elektronik-Freaks. Es wird eine Schaltung für eine sichere Stromversorgung für elektronische Geräte wie Smartphones oder Navi vorgestellt. Die Schaltung hat sich in der Praxis seit Jahren bewährt. Sie war u. a. während des Alpencross 2008 dabei. Bereits ab einer Geschwindkeit von etwa 10 km/h steht am Ausgang eine ausreichend stabile Spannung an.
Das Problem
Versuche zur Realisierung derartiger Stromversorgungen sind nicht wirklich neu. Man findet hierzu im Web diverse Ansätze und fertige Geräte. Viele dieser Realisierungen sind jedoch mehr oder weniger als kritisch anzusehen, weil sie das angeschlossene Navi oder Smartphone unzureichend vor Überspannungen schützen.
Bei hohen Fahrgeschwindigkeiten oder bei Wackelkontakten in der Verkabelung kann die Ausgangsspannung eines Dynamos auf Grund seiner Induktivität leicht auf 100 Volt und weit mehr ansteigen - sogar bis zur Funkenbildung! Ungeschützte elektronische Bauelemente oder Geräte werden damit zwangsläufig "zerschossen" (siehe weiter unten).
Theorie: Der Nabendynamo und sein Verhalten

Die Konzeption und Erprobung des Konzepts erfolgte mit dem Nabendynamo SON28S. Dieser Nabendynamo hat zwar einen recht stolzen Preis, ist aber wegen seiner Eigenschaften wie guter Wirkungsgrad, niedrige Leerlaufverluste, langlebige Industriekugellager und Scheibenbremsen-Montage die erste Wahl. Die technischen Daten findet man auf der Homepage des Herstellers Schmidt Maschinenbau. Unter www.enhydralutris.de [1] findet man viele Messreihen und Informationen zu diesem Thema. Beim Anschluß einer elektronischen Schaltung ist das Verhalten der Ausgangsspannung / -Leistung eines Dynamos erheblich komplexer! Hierzu muss man die elektrischen Eigenschaften genauer analysieren und einige zusätzliche Versuche durchführen, was im folgenden beschrieben werden soll.
Ein Nabendynamo ist gemäß STZVO konstruiert. Das heißt, er liefert bei normaler Radfahrer-Geschwindiigkeit (etwa 15 km/h) eine Leistung von 3 Watt an eine 6 Volt Beleuchtungsanlage. Bei höheren Geschwindigkeiten steigt der (komplexe) Innenwiderstand Zi des Dynamos so weit an, dass die Ausgangsspannung bei konstanter Last (unveränderte Lampenschaltung) nur unwesentlich ansteigt.
Die Ausgangsspannung des Dynamos ist im Leerlauf, d.h. bei fehlender Belastung und den üblichen Fahrrad- Geschwindigkeiten in etwa proportional zur Geschwindingkeit. Hierzu aus [1] die folgenden Anhaltswerte: bei 16 km/h etwa 12 V und bei 40 km/h etwa 30 V (effektive Wechselspannung).
Wenn jedoch der Lastwiderstand erhöht wird, d. h. anstelle einer Scheinwerferlampe werden zwei Lampen in Serienschaltung betrieben, dann kann der Dynamo eine höhere Spannung (12 Volt) und somit auch eine höhere Leistung (12V * 0,5A = 6 Watt) erzeugen. Aber nur bei entsprechend höheren Geschwindigkeiten (> 20 - 25 km/h). Bei geringen Geschwindigkeiten ist das Licht (mit den zwei Lampen in Serie, ohne Extramaßnahmen) zwangsläufig schlechter, oder gar unzureichend.
Erklärung: Der Nabendynamo verhält sich unter Last wie eine Stromquelle, d. h. er versucht bereits bei kleinsten Geschwindigkeiten einen Wechselstrom von etwa 0,5 Ampere durch die angeschlossene Last zu treiben. Wenn eine Last fehlt oder diese den Strom nicht aufnehmen kann, dann steigt die Ausgangsspannung bis zum Wert der Leerlaufspannung an (siehe oben).
Dies kann mit dem Grundgesetzt der Elektrotechnik erklärt werden: Spannung = Strom * Lastwiderstand
Bei einem plötzlichen Wegfall der Last, wie z. B. im Fall eines Wackelkontakts oder beim Abschalten des Scheinwerfers während der Fahrt, kann die Ausgangsspannung soweit ansteigen, dass ein Funke überspringt.
Dies ist physikalisch mit der Induktivität der Dynamospule zu erklären:
Induktionsspannung = Induktivität * Änderungsgeschwindigkeit des Stromes
Die dabei entstehenden Spannungsspitzen können leicht tausend Volt erreichen und bedeuten den sofortigen Tod angeschlossener Elektronikgeräte, sofern diese nicht ausreichend davor geschützt sind. Einfache Spannungsregler bedeuten keinen Schutz, da sie als erstes zerstört werden.
Überspannungsschutz
Aus den vorhergehenden Erläuterungen wurde ersichtlich, dass die Zuverlässigkeit der Schaltung mit einem sicheren Überspannungsschutz steht und fällt. Dieser sollte die folgenden Anforderungen erfüllen:
- sichere Begrenzung von Spannungsspitzen,
- keine hohen Verlustleistungen, d. h. keine Erwärmung, die zur Zerstörung von Bauteilen führen kann,
- Eigensicherheit, d.h. auch bei langen Bergabfahrten mit hoher Geschwindigkeit keine überlastung oder Abschaltung.
Dies kann mit den sonst üblichen einfachen Zenerdioden- oder Varistorschaltungen nicht zuverlässig erreicht werden! Derartige Schaltungen sind als Schutz gegen einmalige und kurzzeitige Spannungsspitzen geeignet, aber nicht als dauerhafter Schutz gegen die bei hohen Geschwindigkeiten auftretenden Leerlauf-Spannung und Leistung eines Dynamos. Ein Dynamo liefert - wie bereits oben erwähnt - über einen weiten Geschwindigkeitsbereich seinen vollen Ausgangsstrom. Die an den Schutzbauteilen anfallende Verlustleistung ist proportional zur Begrenzungsspannung multipliziert mit dem Ausgangsstrom des Dynamos, so dass schnell 5 bis 10 Watt zusammen kommen. Die üblichen Schutzbauteile sind aber nur für Dauerlasten von weniger als einem Watt ausgelegt. Es kommt damit zwangsläufig zu einer starken Überlastung. Diese Überlastung führt zu einem Ausfall und somit zur Zerstörung der nachgeschalteten Elektronik!
Die maximal zulässige Spannung der üblichen elektronischen Bauteile liegt bei 30 Volt. Aus Absatz 3 wissen wir, dass die Leerlaufspannung des Dynamos proportional mit der Geschwindigkeit steigt. Hierzu die folgenden Eckwerte: bei Annahme einer max. Geschwindigkeit von etwa 60 km/h liefert der SON etwa 50 Volt Wechselspannung (effektiv). Entsprechend des im Bild unten sichtbaren Spannungsverlaufs können sich dabei Spitzenspannungen von 100 Volt und mehr ergeben.
Die eigentliche Lösung besteht darin, dass die gefährlichen Überspannungen nicht einfach durch Kurzschließen begrenzt werden, sondern durch Abschalten fern gehalten werden. Dies kann mit einem geeigneten elektronischen Schalter erfolgen. Wenn die Schaltung so auslegt wird, dass dieser Schalter den Strom nicht abruppt unterbricht, dann kommt es auch nicht zu den unter Absatz 3 beschrieben induktiven Spannungsspitzen.
Ein hierzu geeigneter Schalter ist ein Power MOSFET. Dieser hat aber auch keine unendlich hohe Spannungsfestigkeit und muss ebenfalls geschützt werden. Hierzu ist jedoch ein einfacher Varistor mit relativ hoher Begrenzungsspannung ausreichend. Denn unter diesen Bedingungen können an ihm keine hohen Verlustleistungen auftreten. Die Erklärung hierzu findet man ebenfalls in Absatz 3: Der Innenwiderstand Zi des Dynamos steigt bei hohen Geschwindigkeiten stark an, so dass der Ausgangsstrom stark abnimmt. Diese Theorie wurde in der Praxis mit Hilfe von Versuchsfahrten bestätigt.
Schaltungsbeschreibung
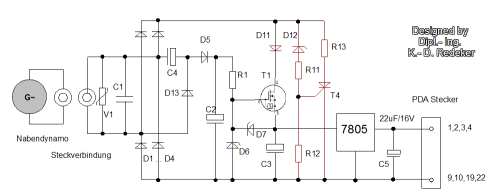
Bild 1: GPS Power Supply (Version 3 / Juni 2009)
| Stückliste zum Schaltbild | |
| Referenz | Beschreibung |
| C1 | Kondensator 0,33 μF 100V |
| C2 | Elko 10 μF 63V |
| C3 | Elko 4700 μF 25V |
| C4 | Elko 1 μF 63V |
| C5 | Tantal Elko 22 μF 16V |
| D1 - D5, D11, D13 | Diode 1N4003 (100V, 1A, oder vergleichbar) |
| D6 | Zenerdiode (siehe Text) |
| D7 | Zenerdiode 8,2V |
| D12 | Zenerdiode 27V |
| V1 | Scheibenvaristor S20K30, 3 Stück parallel, 30 VRMS (typisch 47V, max. 93V) |
| R1 | Widerstand 10 KΩ |
| R11 | Widerstand 330 Ω |
| R12 | Widerstand 100 Ω |
| R13 | Widerstand 33 Ω / 5 W |
| T1 | TEMPFET BTS121 |
| T4 | Thyristor BRX46 (100V, 0.5A) |
| IC1 | Spannungsregler 5V |
V1 besteht aus drei parallel geschalteten Scheibenvaristoren. Die Parallelschaltung stellt sicher, dass bei Ausfall eines einzelnen Varistors noch ein ausreichender überspannungsschutz besteht. D1 bis D4 bilden einen Brückengleichrichter. D5, C2, R1 und D6 erzeugen eine konstante höhere Hilfsspannung zur Ansteuerung von T1. C4 und D13 verdoppeln die Spannung an C2, so dass T1 bereits bei niedrigen Geschwindigkeiten (5 - 10 km/h) vollständig angesteuert wird und der Spannungsverlust über T1 vernachlässigbar bleibt. Für D1 - D4 und D11 sollten eventuell Schottky Dioden verwendet werden um die Verluste bei niedrigen Geschwindigkeiten klein zu halten. D6 bestimmt die max. Spannung an C3 und Spannungsregler IC1. Die Zenerspannung von D6 sollte mindestens 4 Volt über der Ausgangsspannung an C5, aber nicht höher als 27 Volt sein. D7 schützt T1. C3 puffert mit seiner hohen Kapazität die Ausgangsspannung. Es empfiehlt sich T1 und den Spannungsregler IC1 mit einer ausreichenden Kühlung zu versehen.
D11, D12, R11 - R13 und T4 sind optional. Sie verbessern die Zuverlässigkeit der Schaltung bei hohen Geschwindigkeiten. Bei hohen Geschwindigkeiten (> 30 km/h) und geringer Ausgangslast kann die Dynamospannung so weit ansteigen, dass V1 und T1 überlastet werden. Eine Zerstörung dieser Bauteile ist weniger zu erwarten, als dass sich T1 (zum Selbstschutz) abschaltet. Das angeschlossene Gerät wird dann so lange nicht mehr versorgt, bis die Geschwindigkeit wieder ausreichend niedrig ist (< 15 km/h). Um diesen Effekt zu unterdrücken dient der Widerstand R13 (33 Ω / 5 Watt) als "inteligente" Zusatzlast. Die Zuschaltung erfolgt bei Bedarf über den Kleinleistungs-Thyristor T4 (100V, 1A). Das heißt immer dann, wenn der Spannungswert der Sinus-Halbwellen etwa 30 V übersteigt. Wichtig: Die Diode D11 ist in Serie zu T1 geschaltet damit C3 nach dem Zünden von T4 nicht entladen wird.
Nachtrag: der TEMPFET BTS121 wird nicht mehr hergestellt. Ein direkter Ersatz ist nicht bekannt. Es kann auch ein "normaler" Power MOSFET verwendet werden, wobei aber auf ausreichende Kühlung geachtet werden MUSS! Wichtige Daten: UDS 100V, IDS >= 1A, UGS 2 -3 V.
Erprobung
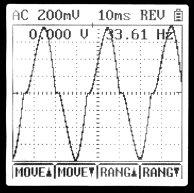
Hierzu wurden etliche Testfahren mit einem am Bike montierten mobilen Oszillograf durchgeführt (Bilder links). Es wurde u. a. untersucht, wie hoch die Spannungen ansteigen können und welche Leistung der Dynamo bei normaler Geschwindigkeit erreichen kann.
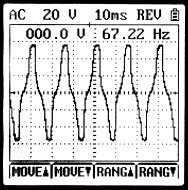
Das erste Oszillogramm zeigt die Ausgangsspannung des SON28S bei angeschlossener Schaltung im Leerlauf, d.h. ohne Laststrom. Der im Oszilogramm sichtbare Kurvenverlauf wiederholt sich pro Radumdrehung 13 mal (=Polzahl).
Die Frequenz (Hz) kann wie folgt berechnet werden: f = v * 3,61 / U, wobei hier U der Radumfang in Metern und v die Geschwindigkeit in km/h ist.
Aus den Daten des ersten Bildes ergibt sich für ein 26' Rad eine Geschwindigkeit von ca. 47 km/h. Die Spannungsspitzen betragen etwa 55 Volt, wobei sich dieser Wert aus der Begrenzungswirkung der Schutzschaltung ergibt.
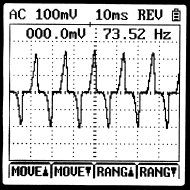
Das zweite Oszillogramm zeigt den unter dieser Bedingung fließenden Ausgangsstrom des Dynamos (hier bei einer Geschwindigkeit von ca. 52 km/h ). Die Messung erfolgte über einem 1,2 Ohm Shunt, so dass sich für die Stromspitzen ein Wert von etwa 0,2 A errechnet.
Die grobe rechnerische Auswertung ergibt für die Schutzbauelemente eine effektive Dauerleistung von knapp über 1 Watt, was bestätigt, dass die Dimensionierung der Schutzbauelemente ausreichend ist. Bei Überprüfung der Bauelemente nach einigen Downhills mit Geschwindigkeiten von über 60 km/h konnten keine Anzeichen einer Überlastung (Überhitzung) festgestellt werden
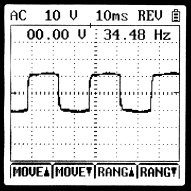
Die beiden folgenden Oszillogramme zeigen die Spannungs- und Stromverläufe unter Last bei einer Geschwindigkeit von ca. 24 km/h an. Die Spannung hat in Folge der Belastung durch die Gleichrichterschaltung einen nahezu rechteckigen Verlauf. Der Strom (letztes Bild) hat dagegen einen nahezu sinusförmigen Verlauf. Die Verzerrungen in den Nulldurchgängen sind auf die Gleichrichter-Dioden zurück zuführen. Der Spitzenwert des Stromes beträgt ca. 0,8 A, was einem Effektivwert von ca. 0,5 A entspricht.
Damit wird der oben unter Absatz 3.1 genannte Wert bestätigt. Das heißt, der Nabendynamo kann unter diesen Bedingungen etwa 6 Watt (= 12 V x 0,5 A) leisten.
Damit ein entsprechendes Bike POWER SUPPLY in der Praxis ausreichend zuverlässig ist, muss der Aufbau vibrationsfest aufgebaut und in ein wasserdichtes Gehäuse eingebaut werden.